FP/MA: Semantic SLAM
Thema: Semantisches SLAM mit Automobilradaren
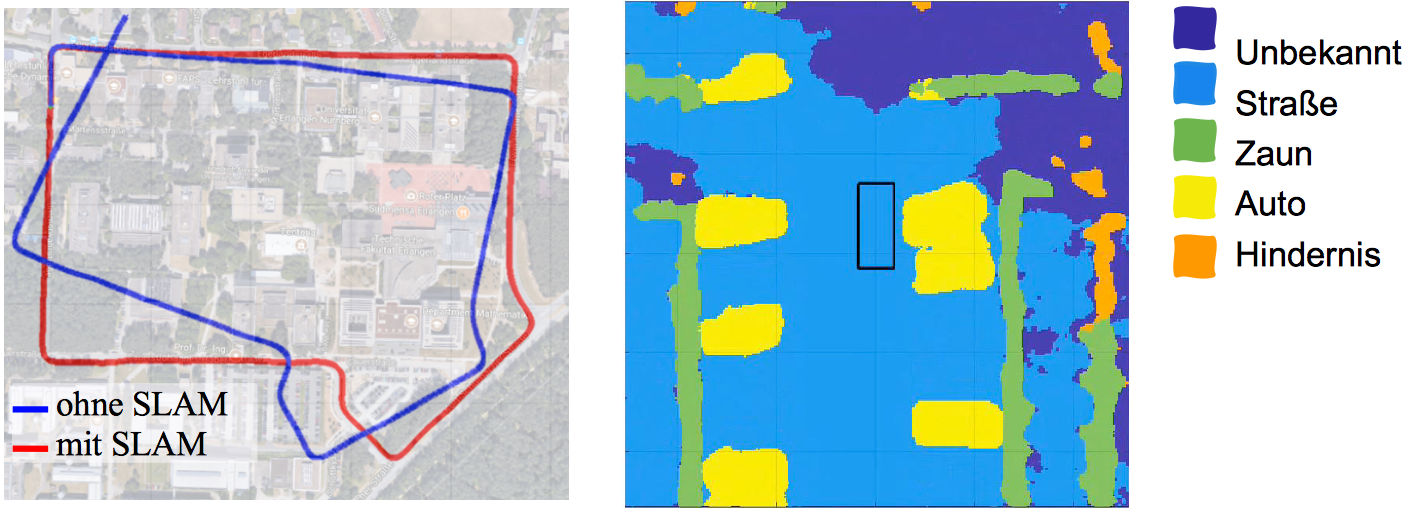
Eine wesentliche Anforderung an autonomes Fahren ist die Fähigkeit des Fahrzeugs, die eigene Position und Trajektorie exakt zu bestimmen. Das erfordert eine genaue Karte der Umgebung, die mithilfe von SLAM-Algorithmen (Simultaneous Localization and Mapping) erstellt werden kann. SLAM zielt darauf ab, eine konsistente Karte einer unbekannten Umgebung zu erstellen und gleichzeitig die Pose des Fahrzeugs zu ermitteln.
Die meisten modernen SLAM-Systeme basieren auf den Sensordaten von Lidaren und Kameras. Radardaten hingegen verfügen über eine zusätzliche Geschwindigkeitsinformation, was für die semantische Segmentierung der Fahrzeugumgebung zuträglich ist. Mit neuartigen Deep Learning-Algorithmen können diese semantische Informationen auch in SLAM-Systemen verwendet werden, um diese signifikant zu verbessern.
Im Rahmen dieser Arbeit soll daher zuerst eine semantisch segmentierte Karte der Fahrzeugumgebung erzeugt werden, die anschließend einem auf Deep Learning basierenden SLAM Algorithmus zugeführt werden soll. Die erzielbare Genauigkeit der Positionsschätzung soll anschließend durch geeignete Benchmarks evaluiert werden.
Aufgabenstellung im Forschungspraktikum:
• Recherche und Einarbeitung in Deep Learning und SLAM-Algorithmen
• Erstellung der Datenbasis, d.h. Annotation der Radarkarte.
• Implementierung des „Semantic Segmentation“-Algorithmus
Aufgabenstellung in der Masterarbeit:
• Implementierung eines grundlegenden geometrischen SLAM-Algorithmus und Erweiterung zum semantischen SLAM.
• Evaluierung der Ergebnisse hinsichtlich erreichbarer Positionsgenauigkeit und Rechenaufwand im Vergleich mit herkömmlichem SLAM und reiner Odometrie
Betreuer: Prof. Dr.-Ing. M. Vossiek, Yi Jin, Marcel Hoffmann
Schwerpunkte: Radardatenverarbeitung, Deep Learning, Python, SLAM
Voraussetzungen: Grundkenntnisse zur Radardatenverarbeitung und Deep Learning
Kontakt: yi.y.jin@fau.de