HiWi: Sensor integration in das Robot Operating System (ROS)
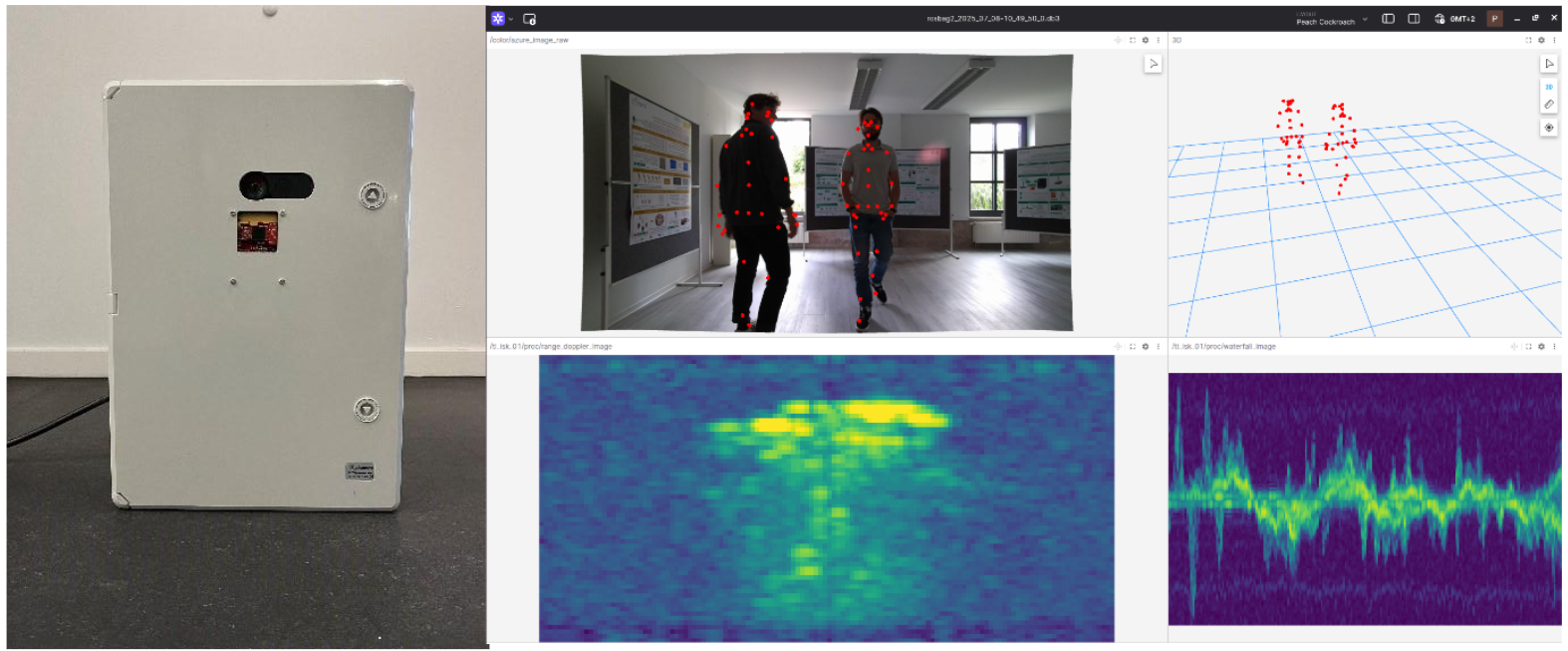
Die Radarbox ist eine am LHFT entwickelte Hardware zur synchronisierten Aufnahme von Azure Kinect‑ und Radardaten. Für die Datenaufzeichnung soll die Ausgabe der beiden Sensoren in das Robot Operating System (ROS) integriert werden. ROS ist ein weit verbreitetes Framework zur Kommunikation zwischen Sensoren und Algorithmen in Robotik‑ und Sensornetzwerken und bietet eine Fülle an Bibliotheken und Tools, die Sensordaten visualisieren.
Wie hier bereits erkennbar ist, besteht das Grundgerüst für die ROS‑Integration der Azure Kinect‑ und Radardaten bereits, muss jedoch noch erweitert werden. Nach aktuellem Stand werden noch nicht alle Sensordaten verwendet, und zudem soll das OMC Motion‑Capture‑System eingebunden, implementiert und erprobt werden. Bei vorhandenen Radarvorkenntnissen gibt es außerdem die Möglichkeit, die Aufgabenstellung zu erweitern und die Radarsignalverarbeitung mitzugestalten.
Voraussetzung für die Mitarbeit an diesem Projekt sind grundlegende Kenntnisse in C++/Python und im Umgang mit Linux. Bei Radarvorkenntnissen, etwa in Bildgebenden Radarsystemen (RAS) oder im Kurs „Radar, RFID and Wireless Sensor Systems“ (RWS), kann die Aufgabenstellung weiter vertieft und individuell angepasst werden.