Wireless Locating and Navigation
We know where you are! The LHFT is a leading institute in the field of 3D wireless locating and navigation. We find solutions even for challenging scenarios such as vibrant, small-scale indoor environments enabling high positioning precision. Our innovative and novel approaches are published in multiple patents and papers proving their outstanding performance.
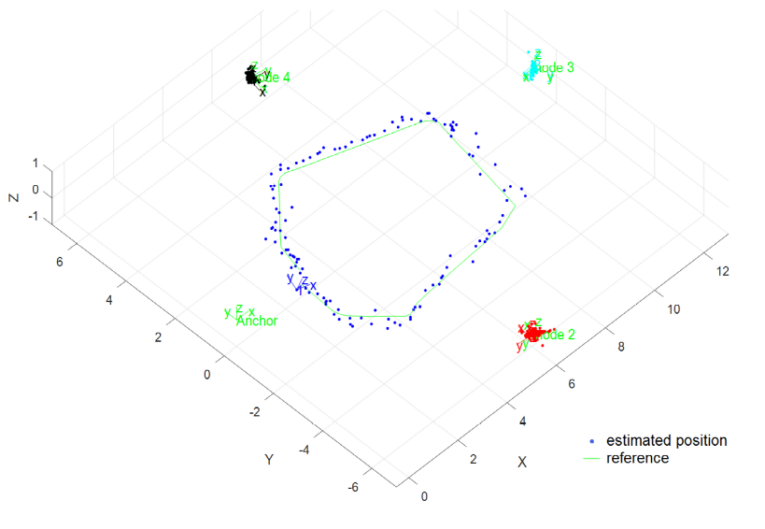
Localization result for one robot by conventional least squares based approach
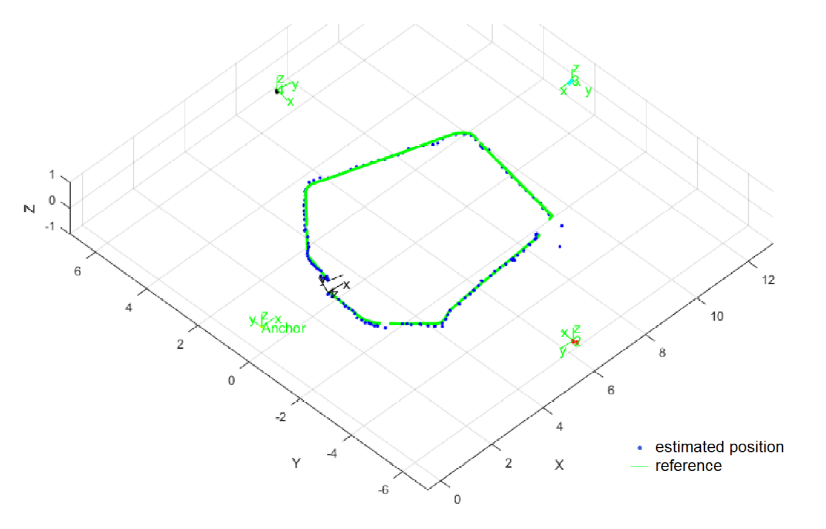
Localization result for one robot by LHFT’s Kalman filter based method