FP/MA: Inbetriebnahme und Evaluation eines MIMO Radarsystems zur Bewegungserfassung von Weltraumschrott
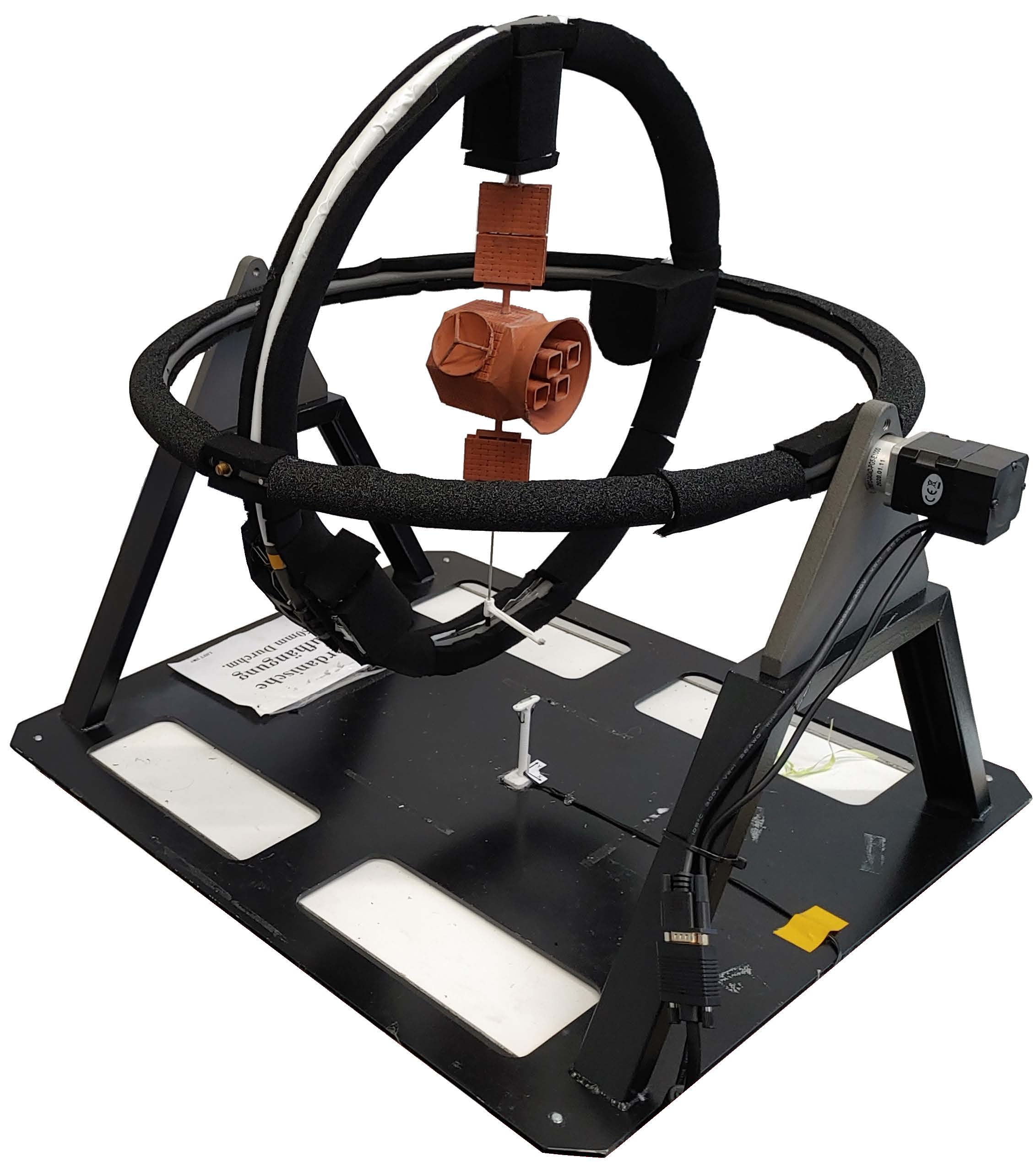
Die zunehmende Privatisierung der Raumfahrt und die damit verbundene intensivierte Nutzung des Erdorbits führt zu einem großen Anstieg der in der Umlaufbahn befindlichen Objekte. Hinsichtlich der daraus resultierenden Kollisionsgefahr ist eine aktive Beseitigung defekter Satelliten und anderer Weltraumschrottobjekte von essentieller Bedeutung. Die dafür benötigten Informationen über die Bewegungsparameter der Zielobjekte wie die Rotationsachse oder Rotationsgeschwindigkeit lassen sich unter Verwendung eines Multiple-Input-Multiple-Output (MIMO)-Radarsystems ermitteln. Zur Verifikation der entwickelten Algorithmen wurde ein Versuchsaufbau bestehend aus einer kardanischen Aufhängung und einem MIMO-Radar realisiert, welcher eine radarbasierte Untersuchung beliebiger Zielobjektrotationen ermöglicht.
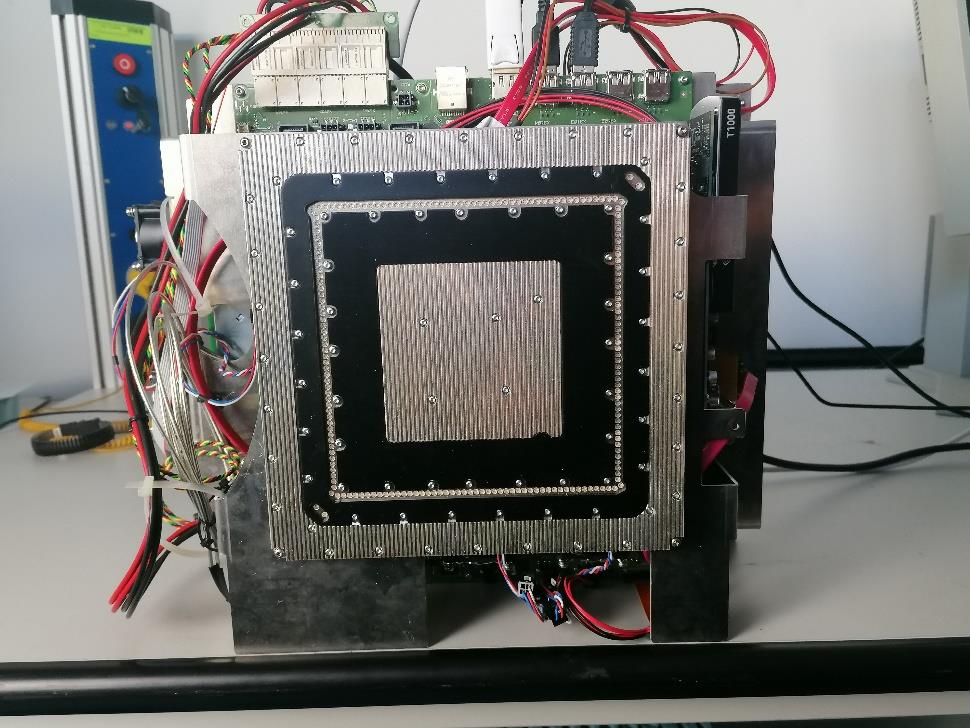
Im Rahmen dieser Arbeit soll ein SFCW-MIMO-Radarsystem mit einem 94 × 94-Array und einer Bandbreite von 10GHz in Betrieb genommen werden. Im Vergleich zum aktuell verwendeten Modell besitzt es eine deutlich größere Auflösung, weshalb durch den Einsatz dieses Radarsystems eine erhebliche Verbesserung der Rotationsparameterschätzung erzielt werden kann. Zunächst ist die bereits existierende Ansteuerungssoftware an das gegebene Anwendungsszenario anzupassen, bevor erste Messungen mit statischen und bewegten Zielen durchgeführt werden. Im Anschluss sollen verschiedene Bildgebungsverfahren verglichen sowie simulativ und messtechnisch evaluiert werden.

Betreuer: Christoph Kammel (M.Sc.), Johanna Bräunig (M.Sc.), Prof. Dr.-Ing. M. Vossiek
Schwerpunkte: Messgeräteansteuerung, Messdurchführung, Radarsignalverarbeitung, Radarbildgebung
Voraussetzungen: Grundkenntnisse in Radarsignalverarbeitung (z.B. DSR / RAS), Python
Kontakt:

Dr.-Ing. Johanna Bräunig
- Phone number: +49 9131 85-65202
- Email: johanna.braeunig@fau.de
Inbetriebnahme_und Evaluation_eines_MIMO_Radarsystems_zur_Bewegungserfassung